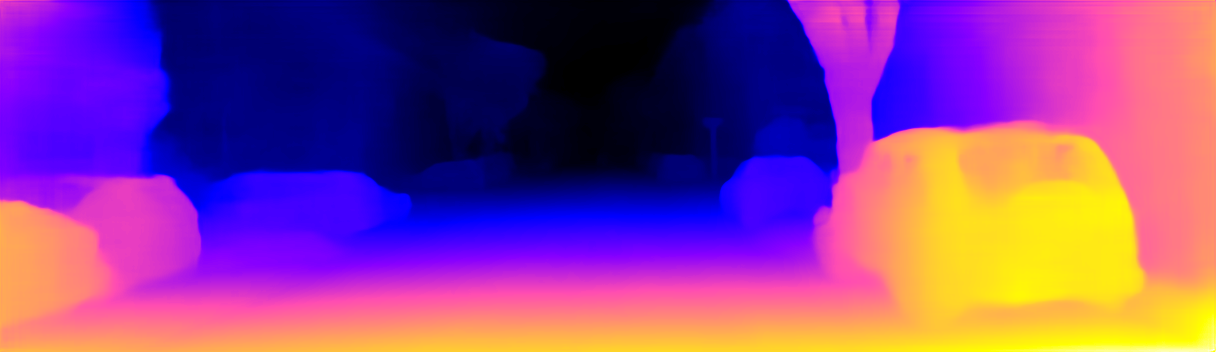
pages/projects.md AI Visual odometry Evaluated classical stereo vision and deep learning-based methods for visual odometry on KITTI dataset, analyzing their efficacy in calculating depth maps and tracking motion. Tissue Segmentation A vision transformer-based model uses the Coat architecture for binary FTU segmentation with an auxiliary loss for regularization. Software SafeZoneUofI Developed a dedicated platform for sharing and reporting of crime information and fostering a safer environment around UIUC campus area.